Herausforderung
Herkömmliche Rollatoren haben häufig das Problem, dass ältere Personen aufgrund nachlassender Kraft Schwierigkeiten haben, Steigungen oder unebene Untergründe wie Kies- und Waldwege zu bewältigen. Das hat zur Folge, dass sie viele Wege gar nicht mehr oder nur noch mit Hilfe von anderen bewältigen können.
Lösung
Wir entwickeln eine motorisierte Gehhilfe mit Steigungserkennung, die auch Kies- und Waldwege ohne Probleme bewältigen kann.
Wir möchten älteren und gehbeeinträchtigten Menschen helfen, wieder selbständiger zu werden, sodass sie ihre gewohnten Wege ohne Unterstützung Dritter bewältigen können.
Aktueller Stand
1.Semester
Im ersten Semester lag unser Fokus darauf Die Antriebsart zu testen und erste Erkenntnisse zur Steuerung zu sammeln. Dafür haben wir einen handelsüblichen Rollator mit der Technik und den Rädern eines Hoverboards ausgestattet. Aufgrund der Erkenntnisse, die wir aus diesem Prototyp gezogen haben, entschieden wir uns gegen das herkömmliche Konzept des Ziehens. Stattdessen wollen wir die Personen am Rücken schieben.
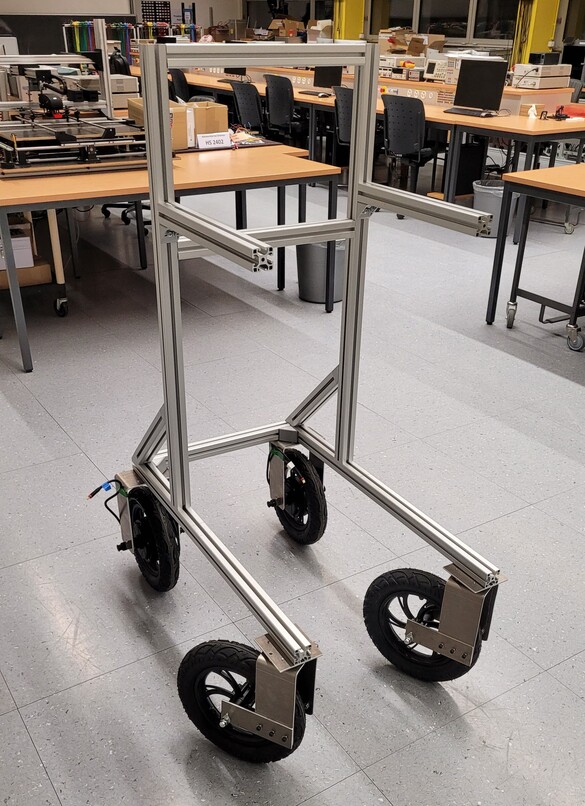
2.Semester
Mit den Erkenntnissen aus dem ersten Semester haben wir damit begonnen unseren zweiten Prototyp zu konstruieren. Den Rahmen haben wir aus Item-Profilen gebaut. Da unsere Gehhilfe für jegliches Gelände geeignet sein sollte, haben wir uns für grosse Offroadräder entschieden. Die beiden Hinterräder haben ausserdem einen eingebauten Motor (Rad-Naben-Motor) mit denen wir die Gehhilfe antreiben wollen.
Bei ersten Tests ist uns aufgefallen, dass die Positionierung sowie die Lagerung der Räder nicht ideal ist, weswegen wir zur Zeit dabei sind dies zu überarbeiten.
Unser Team

Florian Hug

Gabriel Brunner

Jonas Vollmar

Lena Bösch

Luca Bresch

Marvin Keller

Sarah Walser
Cara Mai Vy Lais

Noemi Jud
Sponsoren
 Bereitstellung der Location für das Projektvideo
Bereitstellung der Location für das Projektvideo Ausleihe von Equipment für das Projektvideo
Ausleihe von Equipment für das Projektvideo Ausleihe von Equipment für Header-Video und Projektvideo
Ausleihe von Equipment für Header-Video und Projektvideo Bereitstellung von Filament und 3D-Druckerzugang
Bereitstellung von Filament und 3D-Druckerzugang
Impressionen




