Herausforderung
Autonome Drohnen könnten rund um die Uhr arbeiten – wären da nicht ihre grössten Schwachstellen: kurze Flugzeiten und zeitaufwändige Akkuwechsel. Jeder Stillstand kostet wertvolle Einsatzminuten und bindet Personal.
Unsere Lösung
Unser autonomes Drohnen-Dock mit integriertem Akkurevolver übernimmt den Akkuwechsel vollautomatisch, überwacht den Ladezustand und lädt besonders schonend. So verlängern wir die Einsatzdauer, steigern die Effizienz und schaffen eine zukunftsweisende Infrastruktur für den autonomen Drohneneinsatz.
Unser Marketing-Video im 4 Semester
1. Semester
Im ersten Semester lag unser Fokus ausschliesslich auf der Entwicklung des Zentrierungssystems für den automatisierten Akkuwechsel. Wir haben verschiedene Konzepte erarbeitet und analysiert, um die bestmögliche Lösung zu finden. Nach umfangreichen Tests und Vergleichen haben wir uns schliesslich für ein Zahnradsystem entschieden, da es präzise, zuverlässig und effizient arbeitet.
Unser Ziel war es, ein System zu entwickeln, das die Drohne nach dem Landen exakt ausrichtet, um einen reibungslosen Akkuwechsel zu ermöglichen. Durch zahlreiche Prototypen und Optimierungen konnten wir eine funktionierende Lösung realisieren.
Dieser Erfolg bildet die Grundlage für die nächsten Entwicklungsschritte, in denen wir den Greifer und das Akkumagazin integrieren und optimieren werden.
2. Semester
Im zweiten Semester stand die Konstruktion einer eigenen Drohne im Vordergrund. Ein wesentlicher Arbeitsschwerpunkt war die Auswahl eines geeigneten Akkus, bei dem Gewicht, Energiedichte und Leistungsfähigkeit berücksichtigt wurden. Zur Integration des Akkus wurde eine Halterung entwickelt, die mithilfe von 3D-Druck gefertigt werden konnte. Nach mehreren Designiterationen entstand eine Lösung, welche die einfache Entnahme und den Austausch des Akkus ermöglicht und gleichzeitig den Anforderungen an Stabilität und Gewicht entspricht.
Parallel dazu wurde an der Entwicklung einer Greifertechnik gearbeitet. Nach Analyse verschiedener Ansätze fiel die Wahl auf eine Lösung mit Solenoiden, da diese eine präzise und zuverlässige Betätigung des Greifers ermöglicht. Darüber hinaus wurde ein Konzept für ein Akkurevolver-System sowie die Konstruktion einer Halterung und Verschiebebahn für den Greifer erarbeitet. Erste Ideen zum strukturellen Aufbau dieser Komponenten wurden ausgearbeitet und bilden die Grundlage für die weitere Umsetzung im nächsten Projektabschnitt.
Was als Nächstes kommt:
- Greifer
- Akkurevolver
3. Semester
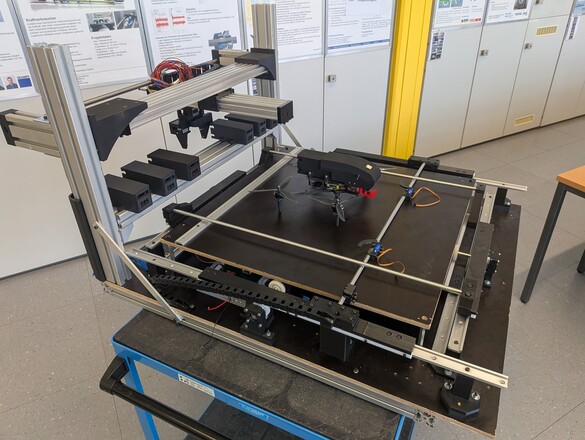
Im dritten Semester stand der Aufbau eines funktionsfähigen Prototyps unseres automatisierten Akkuwechsel-Systems im Mittelpunkt. Wir haben die komplette Brückenkonstruktion gefertigt, den Greifer aufgebaut und mit Sensorik sowie der notwendigen Elektronik ausgestattet. Der Fokus des Semesters war damit der Zusammenbau unseres Docks, um danach den Prozess zu testen.
Ein Schwerpunkt lag auf der Entwicklung der Steuerung für die beiden Solenoide, die den Akku sicher greifen und lösen. Bis jetzt konnten vom vollständigen Prozess noch keine Tests gemacht werden, da die Elektronik für die Greifer angepasst werden muss.
Mit den nun integrierten mechanischen und elektronischen Komponenten ist ein, bis auf einige noch zu lösende Fehler, testfähiger Prototyp entstanden, der die Basis für die nächste Entwicklungsphase – insbesondere den Akkurevolver – bildet.
4. Semester
Im vierten Semester ging es uns um die Optimierung. Der Greifer wurde überarbeitet und nochmals auf die genaue Anwendung optimiert. Zudem wurde die Elektronik für das Akkusystem zu Ende geplant. Jetzt lag der Fokus darauf, diese Systeme zusammenzubauen und sie dann mit der bereits fertigen Software auf Bugs und Fehler in der Konstruktion zu prüfen. Wir waren beim Endspurt des Prototypen angekommen.
Nebenbei wurden noch stabilisierende Elemente und Abdeckungen für die Sicherheit, aber auch das Optische geplant, konstruiert und verbaut.
Der Prototyp ist nun für den Kunden bereit.

Unser Team
PowerNest-Team
Mechanik – Fabian Kaufmann
gelernter Konstrukteur – Teilzeit (Stadler Rail)
Elektronik – Luca di Mauro
gelernter Elektroniker – Vollzeit
Webseite & Abgaben – Lovisa Kleinferchner
Maturandin – Teilzeit (Stadler Rail)
Software – Alessio Bragagna
Maturand – Vollzeit
Montage – Johann Biedermann
Maturand – Vollzeit
Termine & Bestellungen – Jonathan Vogt
Maturand – Vollzeit
Haben Sie Interesse oder Fragen? Kontaktieren Sie jonathan.vogt@ost.ch
Unsere Arbeit in Bildern




