Warum haben wir dieses Projekt gewählt?
In vielen Notfällen müssen Personen, die medizinische Hilfe benötigen, aus mehrstöckigen Gebäuden transportiert werden. Besonders in engen Treppenhäusern ist dies für Rettungskräfte körperlich anspruchsvoll und organisatorisch aufwendig.
Aktuell werden dafür häufig Treppenstühle, Tragen oder, je nach Situation, auch Drehleitern und Hubretter eingesetzt. Die passende Methode hängt stark von den Platzverhältnissen, dem Zustand der betroffenen Person und den verfügbaren Einsatzkräften ab. Dadurch können zusätzliche personelle oder technische Ressourcen notwendig werden.
Mit der Mobile Utility Platform wollten wir untersuchen, ob ein elektrisch unterstütztes System den Transport über Treppen erleichtern und Rettungskräfte im Einsatz entlasten kann.

Projektidee
Die M.U.P. wurde als mobile, elektrisch unterstützte Plattform konzipiert. Sie soll Rettungskräfte beim Transport einer liegenden Person unterstützen und den Kraftaufwand während des Einsatzes reduzieren.
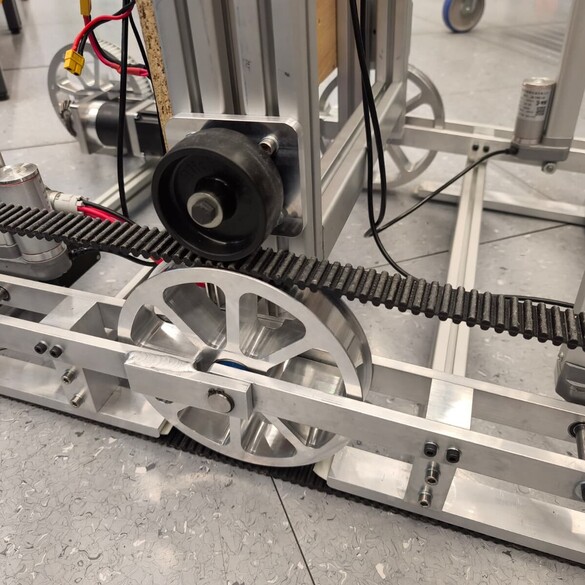
Ein zentrales Element des Konzepts ist der Raupenantrieb. Dieser soll es ermöglichen, Hindernisse und Treppen besser zu überwinden als mit herkömmlichen Rädern. Zusätzlich wurde eine verstellbare Raupenhöhe vorgesehen, damit sich die Plattform an unterschiedliche Treppensituationen anpassen kann.
Neben der Mobilität standen auch die Bedienbarkeit, die Sicherheit und die kompakte Bauweise im Fokus. Die Plattform soll in engen Gebäuden eingesetzt werden können und gleichzeitig eine möglichst stabile Lagerung der transportierten Person ermöglichen.
Aktueller Stand
Was wurde umgesetzt?
Im Verlauf des Projekts wurde ein erster motorisierter Prototyp entwickelt, aufgebaut und getestet. Der Prototyp kann ferngesteuert fahren und besitzt verstellbare Raupen, mit denen das Anfahren von Treppen vorbereitet werden kann.
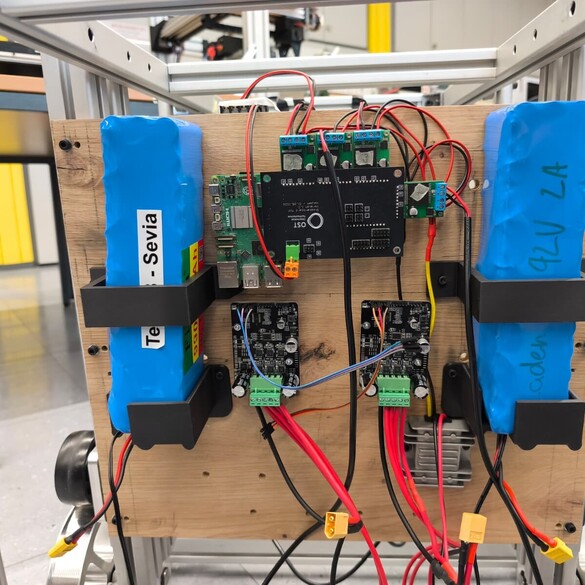
Die Umsetzung umfasste mechanische Konstruktion, elektrische Antriebstechnik, Steuerung und Software. Durch erste Fahr- und Funktionstests konnten wichtige Erkenntnisse über das Verhalten der Plattform gesammelt werden.
Umgesetzt wurden insbesondere:
- ein motorisierter Fahrantrieb
- eine ferngesteuerte Bedienung
- verstellbare Raupen zur Anpassung an Treppensituationen
- ein erster mechanischer Aufbau als Funktionsprototyp
- erste Tests zur Fahrbarkeit, Stabilität und Bedienung
Ergebnis des Projekts
Das Projekt zeigt, dass die Grundidee einer elektrisch unterstützten Transportplattform technisch vielversprechend ist. Der Prototyp konnte die wichtigsten Grundfunktionen demonstrieren und diente als praktische Grundlage, um die Machbarkeit des Konzepts besser einzuschätzen.
Besonders wertvoll waren die Erkenntnisse aus den Tests. Sie zeigten, welche Bereiche bereits funktionieren und wo für eine praxistaugliche Weiterentwicklung noch Verbesserungen notwendig sind. Dazu gehören insbesondere die mechanische Stabilität, die Steuerung, die Elektronik sowie die zuverlässige Bewegung auf Treppen.
Der Prototyp ist damit kein fertiges Rettungsgerät, sondern ein erster Funktionsnachweis. Er bildet eine Grundlage für weitere Entwicklungsschritte und zeigt, welches Potenzial in der Mobile Utility Platform steckt.
Erkenntnisse
Während des Projekts konnten wir viele praktische Erfahrungen in der Entwicklung eines mechatronischen Systems sammeln. Besonders deutlich wurde, wie eng Mechanik, Elektronik und Software miteinander zusammenhängen.
Schon kleine Änderungen an der Konstruktion haben Einfluss auf die Stabilität, das Fahrverhalten und die Steuerung. Gleichzeitig zeigte sich, dass ein Rettungsgerät sehr hohe Anforderungen an Sicherheit, Zuverlässigkeit und Bedienbarkeit erfüllen muss.
Wichtige Erkenntnisse aus dem Projekt waren:
- Ein Raupenantrieb bietet Potenzial für den Einsatz auf Treppen.
- Die mechanische Stabilität ist entscheidend für ein sicheres Fahrverhalten.
- Die Bedienung muss einfach und intuitiv sein.
- Elektronik und Software müssen zuverlässig zusammenarbeiten.
- Für einen realen Rettungseinsatz wären umfangreiche weitere Tests notwendig.
Ausblick
Für eine Weiterentwicklung der M.U.P. müssten vor allem die mechanische Stabilität, die Elektronik und die Software weiter optimiert werden. Ein nächster wichtiger Schritt wäre die zuverlässige Treppenfahrt unter realitätsnahen Bedingungen.
Zusätzlich müssten Sicherheitsfunktionen, Bremsmechanismen, Sensorik und die Lagerung der transportierten Person genauer ausgearbeitet werden. Auch die Bedienung durch Rettungskräfte müsste gemeinsam mit Fachpersonen getestet und verbessert werden.
Langfristig könnte aus dem Konzept eine technische Unterstützung entstehen, welche Rettungskräfte bei körperlich anspruchsvollen Transporten entlastet und den Patiententransport in schwierigen Gebäudesituationen erleichtert.
Unser Team
Wir sind sieben Mechatronik Studenten.
Falls Sie Interesse an unserem Projekt haben, bitte kontaktieren Sie:
- Jonas Walpen: jonas.walpen@ost.ch
- Cyril Frangi: cyril.frangi@ost.ch

Andrea Deflorin

Cyril Frangi

Nicole Hofer

Talin Janett

Sevia Schaufelberger

Jonas Walpen

Jordan Hug
Wir danken unseren Sponsoren

Danke für die Motoren! Maxon Motors

Buesser Formenbau AG

